ITMO大学根据形态学设计原理制作了一个弹跳机器人
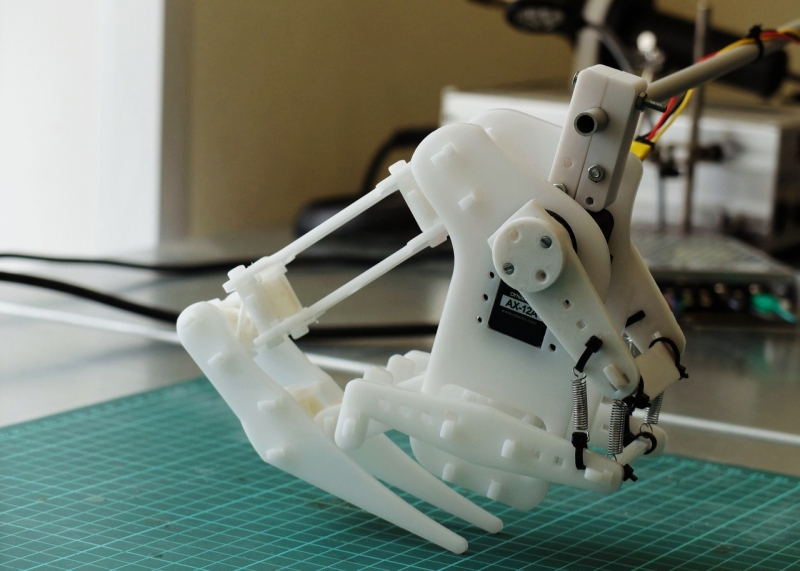
生物机电一体化和节能机器人国际实验室已经制作了一个节能跳跃机器人的原型。该设计基于柔性关节和一个串联了弹性元件的伺服驱动器。
生物仿生学的原理
控制系统和机器人专业的一个硕士团队正致力于开发一个具有独特形态特征的奔跑机器人。该团队的主要目的是开发一种同时具有轻质、灵活、节能和功能性的设计。为了实现这一目标,需要同时使用生物仿生学的原理和形态学计算。目标是创造一个需要最小的驱动力,即能源的设备,同时仍然能够在粗糙的地形上移动,克服障碍,并能抵抗物理损坏。
形态学设计
能源效率是有效利用有限能源预算的能力。为了节省电动机的驱动力,可能设计一种机器人,其中大部分所需的动力学是由机械学引起的,而控制系统的任务则减少为稳定和增强机器人的动力学。这一设计原则被称为形态学计算。
灵活的元素
此外,为了实现高能源效率,有必要使机器人的身体尽可能地轻盈--摆脱所有沉重的部件。为了解决第二个任务,ITMO的伙伴大学特文特大学的研究成果被应用。
机器人的所有主要部件也是由塑料制成的:身体部件和所有关节都是由聚甲醛激光切割而成,并使用塑料夹子固定。
一个用于测试的原型
奔跑的机器人不是一个成品,而是一个测试形态设计方法的课题,特别是灵活的关节--以前没有以这种方式设计的类似机器人。奔跑的机器人也是学习控制方法和动态系统如何与环境互动的案例。
在未来,该团队计划制作一个不仅能当场跳起,而且能在粗糙的地形上全力移动的机器人。这需要合成一个更复杂的腿部机制,它将能够重新配置运动轨迹。